Paper List
acceleration
Turbo-GS: Accelerating 3D Gaussian Fitting for High-Quality Radiance Fields
Brown University, Indian Institute of Science, Cornell ArXiv 2412.13547
- 提出的Turbo-GS在减少优化次数的同时进行更频繁和高效的致密化,比现有方法的速度快几倍;
- 做出了一系列设计,实现了频繁且高效的致密化、更好的初始化以及稳定的梯度;
- 其他设计,如批量处理策略、带空洞的渲染等;
核心贡献
作者指出,由于梯度消失,原版的使用位置梯度作为指标的3DGS致密化策略在无纹理区域经常失效。见下图:
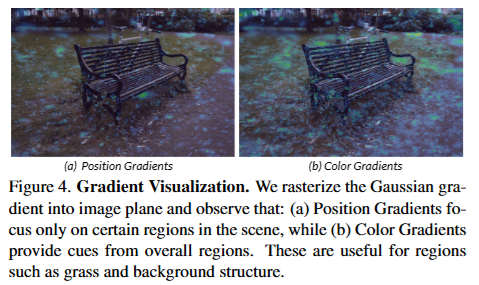
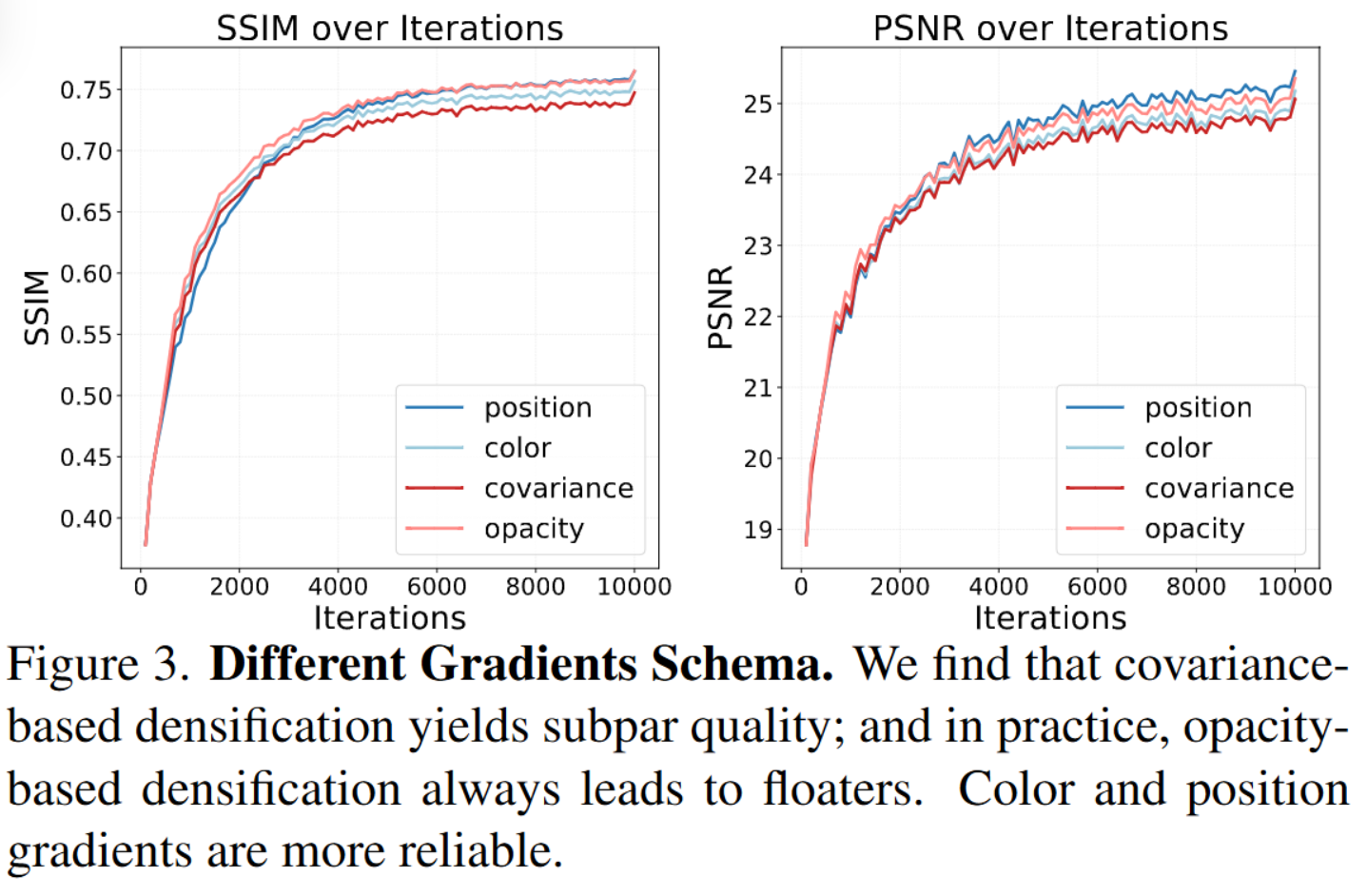
作者对高斯球各个属性的梯度进行了分析,发现使用位置梯度做致密化在开始时收敛较慢(可能是由于无纹理区域的局部最小)。使用颜色做致密化则收敛较快,但是很难准确得到场景结构,导致对场景的过拟合。而协方差和透明度贡献比较小,使用透明度做致密化甚至会产生虚影。因此作者选用位置和颜色的梯度作为致密化的指标,使用这种策略,也能有效的解耦场景的外观和几何。
见之前的figure 4,基于位置的策略在无纹理区域的信号较弱,而基于颜色的策略则在无纹理区域有较强的信号。结合这两种策略,就能够获得一个场景结构和外观都更精细的重建结果。
text2gs
Text-to-3D using Gaussian Splatting(CVPR'24)
CVPR'24 diffusion, language embedding
language embedding
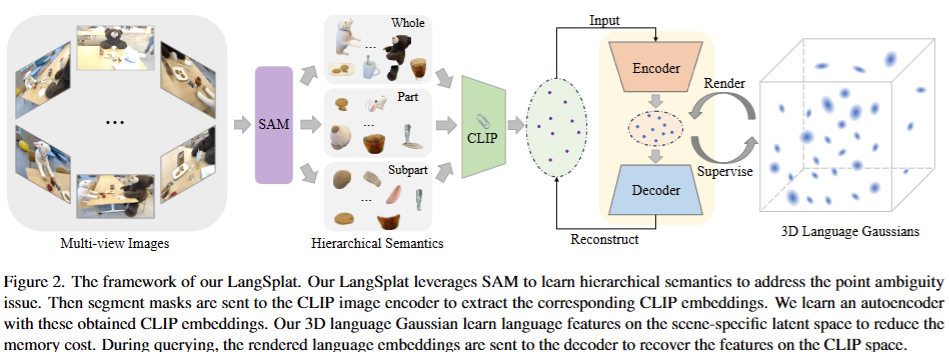
LangSplat: 3D Language Gaussian Splatting
THU, Harvard CVPR'24 language embedding
editing
GaussianEditor: Swift and Controllable 3D Editing with Gaussian Splatting
NTU, THU, SenseTime CVPR'24
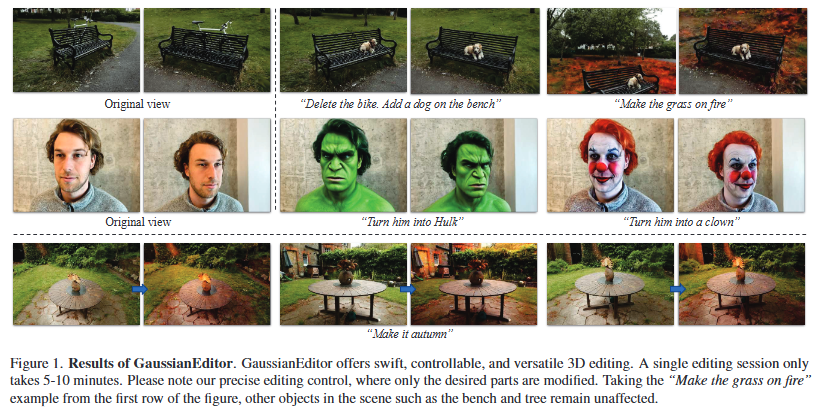
- 通过语义信息增强了编辑的精度和控制能力;
- 提出层次化GS(Hierarchical Gaussian Splatting, HGS),使用2D 扩散模型获取更稳定和精细的结果;
- 支持物体的移除和嵌入;
dynamic scene
HUGS: Holistic Urban 3D Scene Understanding via Gaussian Splatting
ZJU, Huawei, University of Tubingen CVPR'24
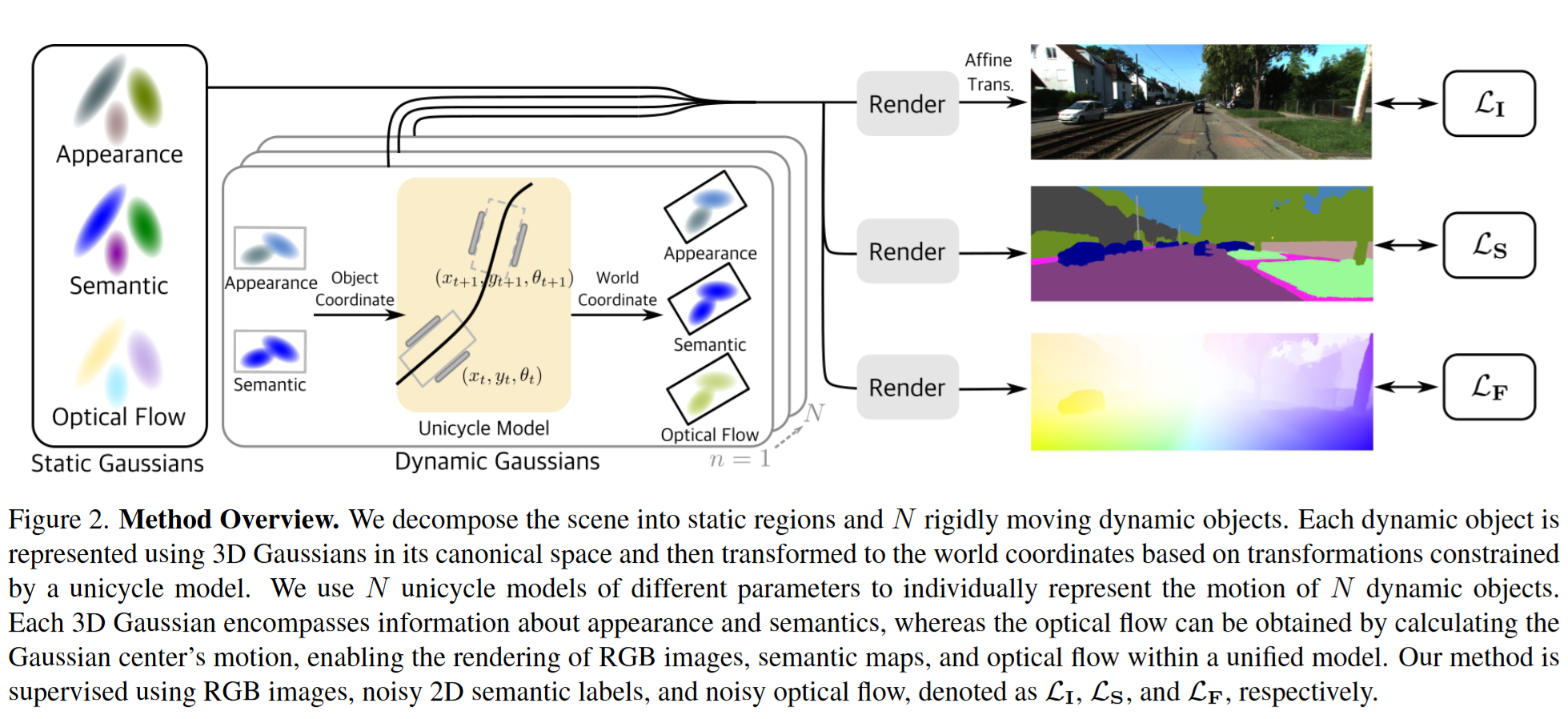
- 通过将GS扩展到更多维度(语义、光流、相机曝光、动态物体),提出了动态城市场景理解任务;
- 使用稀疏的城市场景图片和有噪声的标签,并结合物理约束,在不需要GT 3D bbox的情况下实现了静态场景和动态物体的解耦;
3D Geometry-aware Deformable Gaussian Splatting for Dynamic View Synthesis
NWPU, Samsung CVPR'24
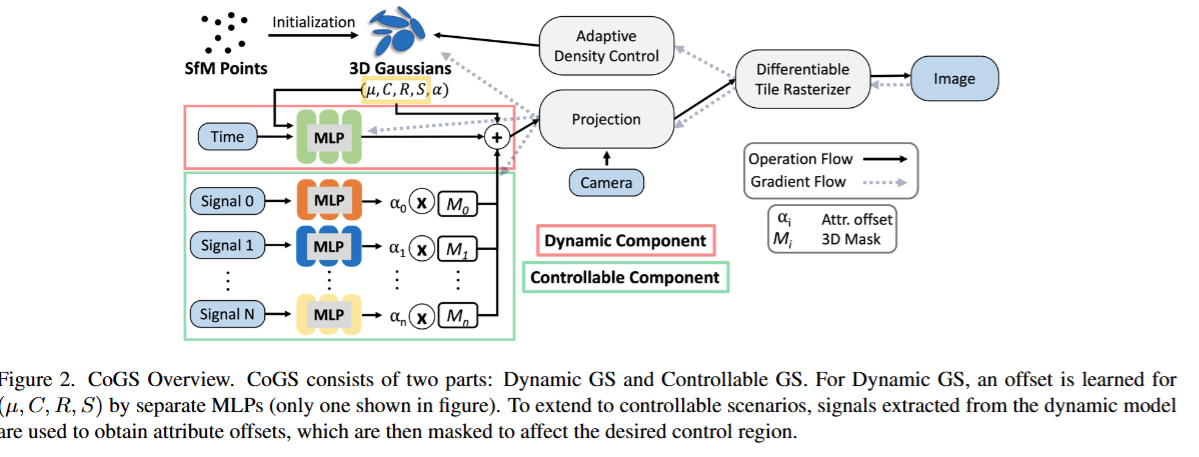
CoGS: Controllable Gaussian Splatting
CMU, Fujitsu Research CVPR'24